Engineering Work
Click any project to expand — real drawings, CAD models, and research outputs.

Production-line robotics, TCP calibration fixture design, welding cell optimization, and EOAT redesign on the Model 3 Body in White line at Tesla Fremont.
Led transformation of a legacy Model S/X production line into a 40-station humanoid robotics training academy. Floor plan, HRC cell design, safety systems specification.
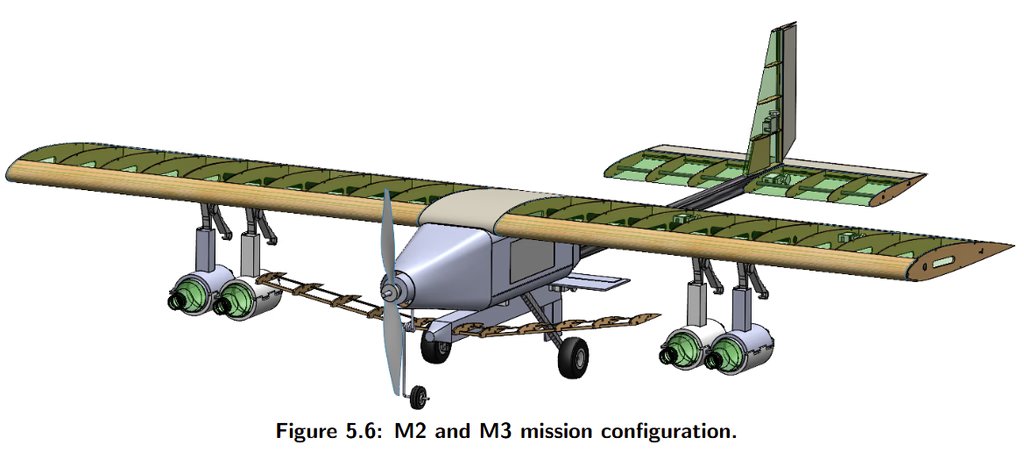
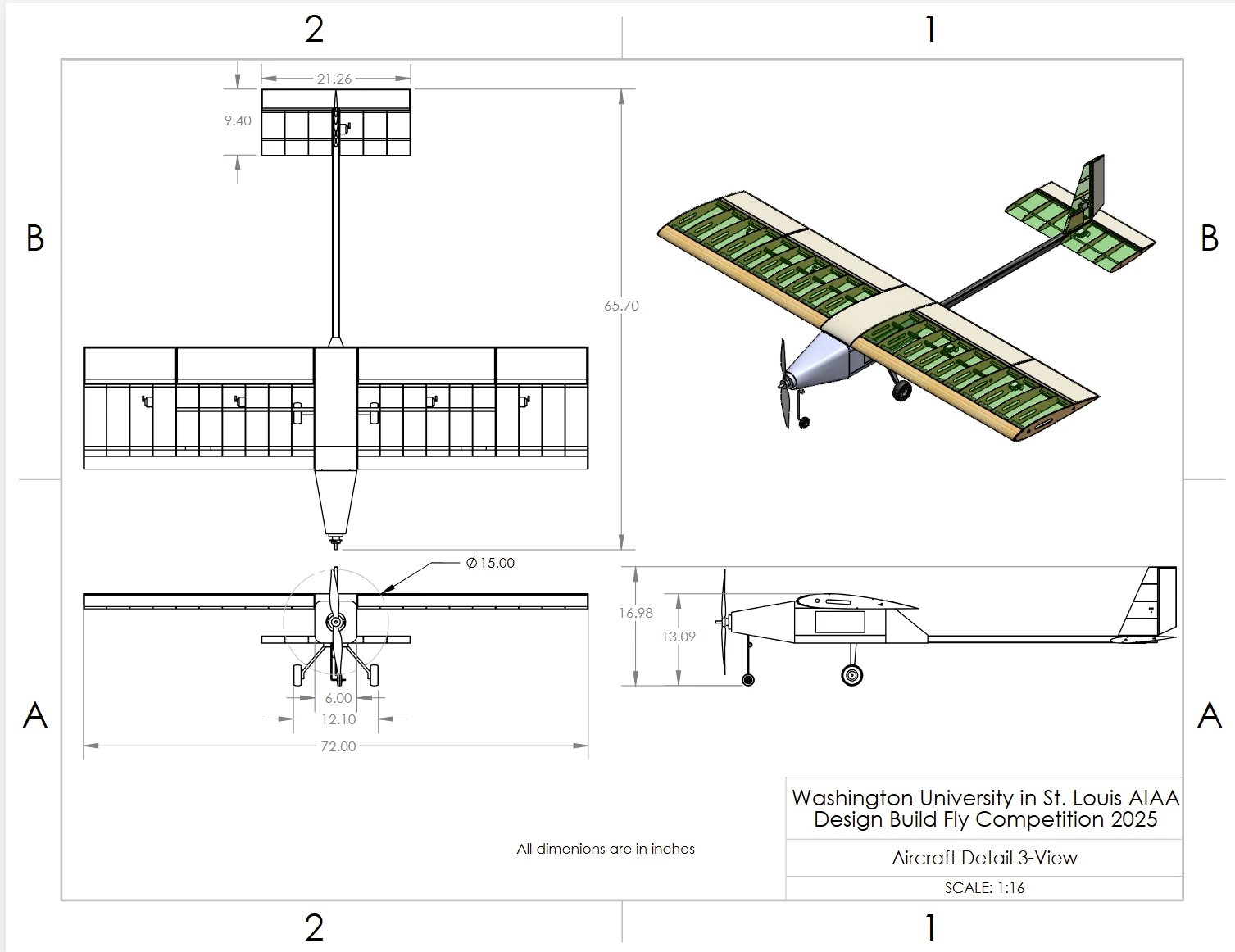
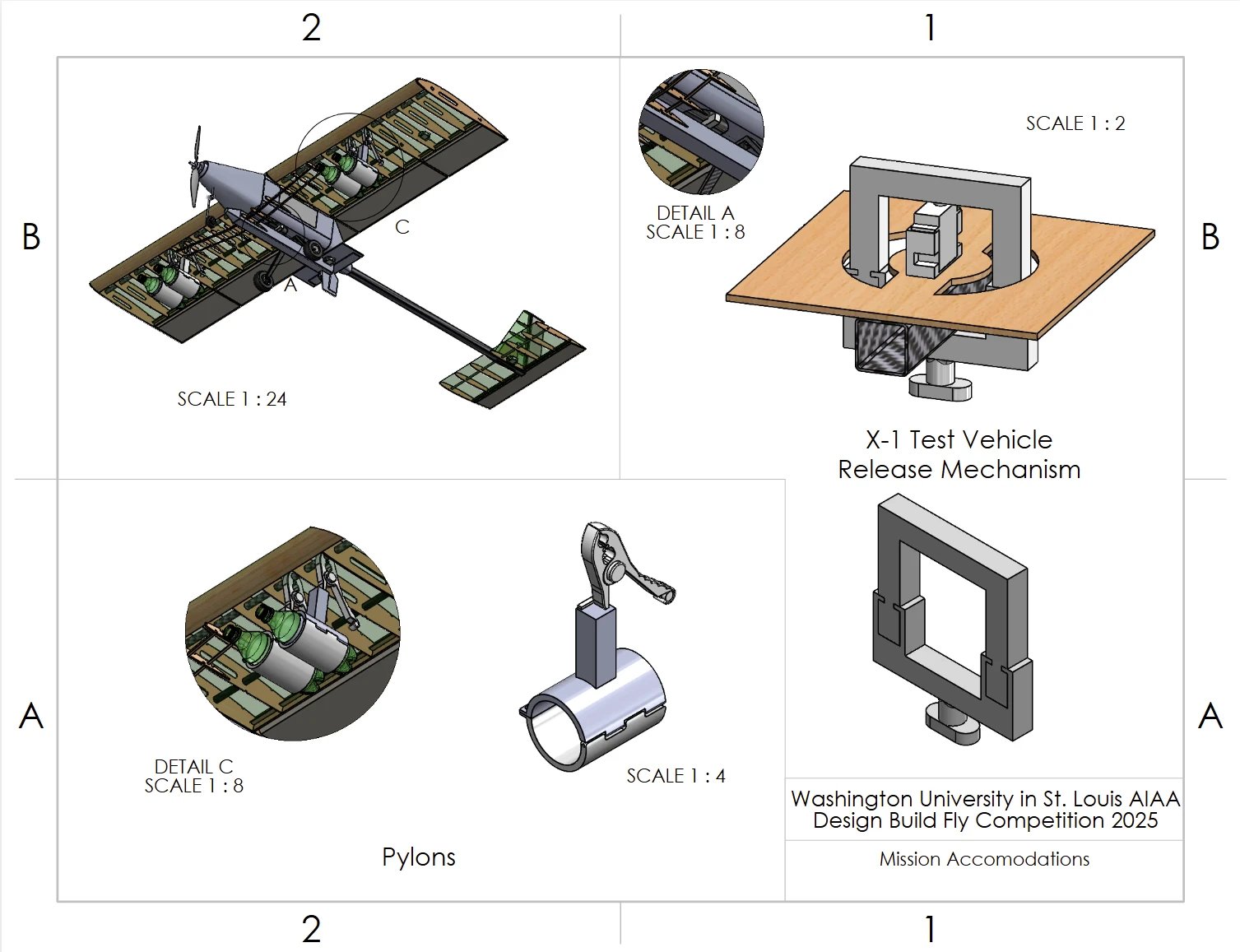
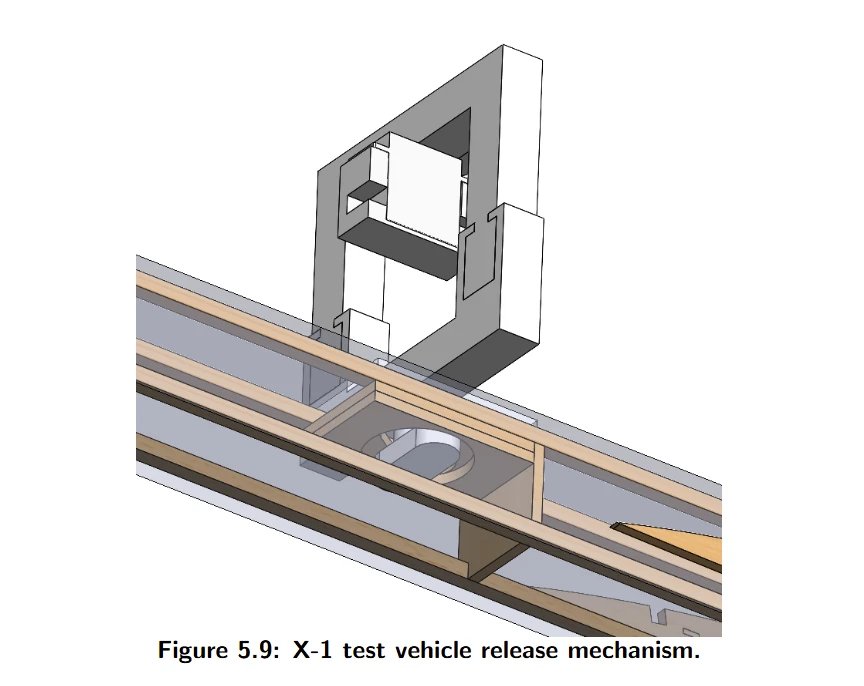
National aircraft design competition — composite airframe structures, FEA validation, and fabrication. 72" wingspan competition aircraft.
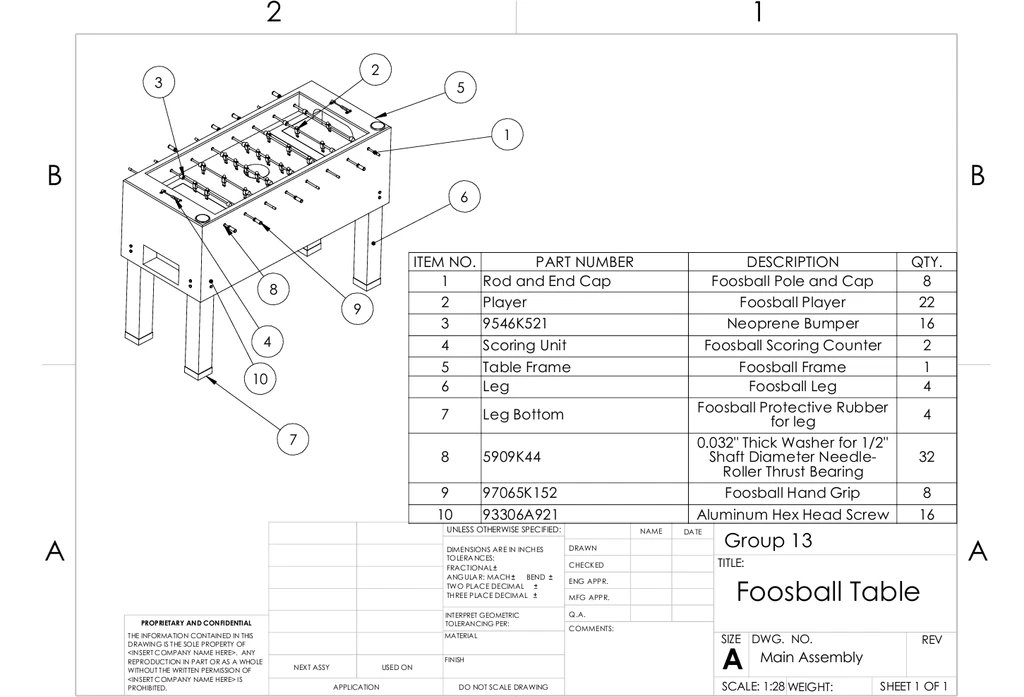
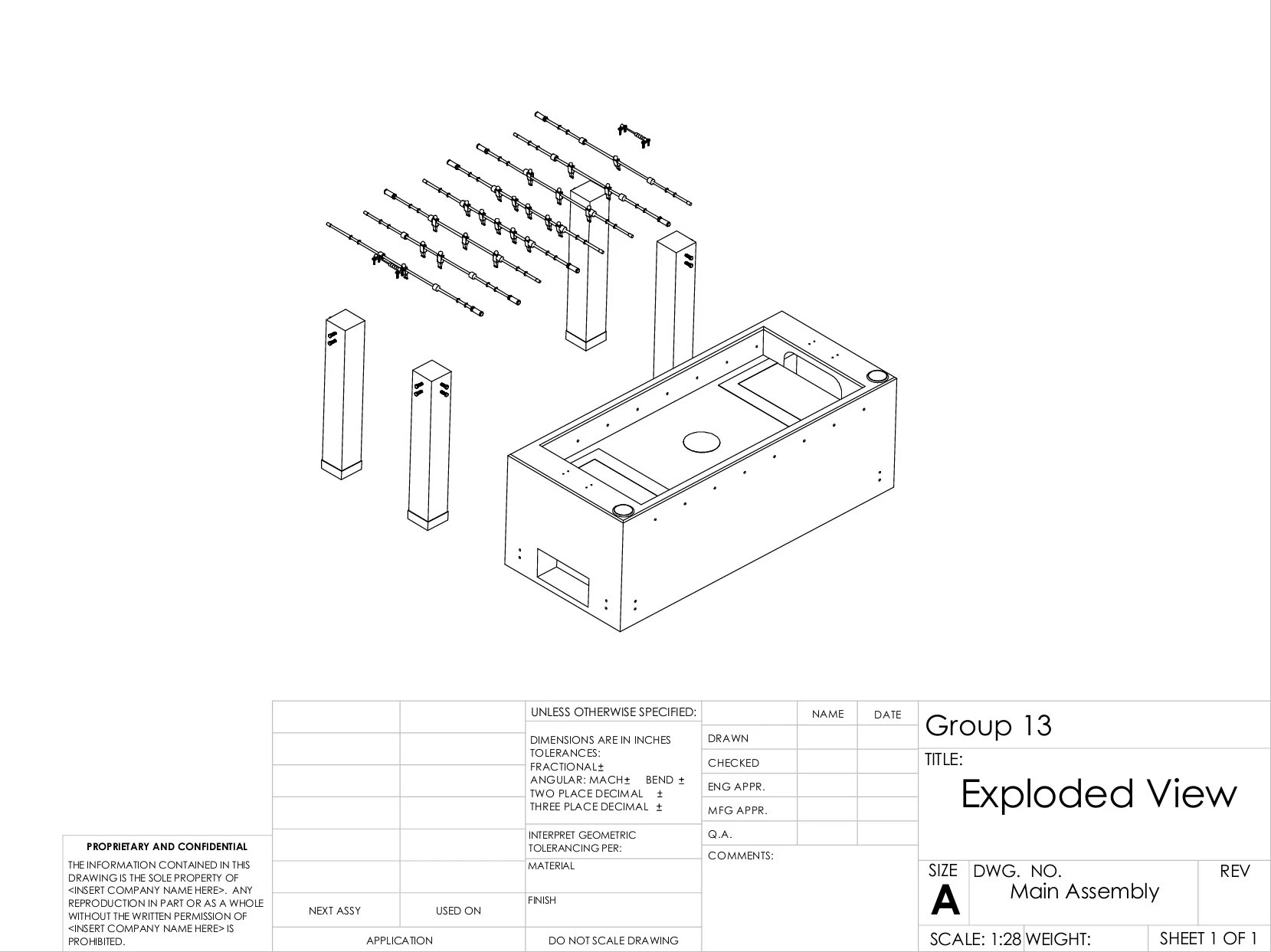
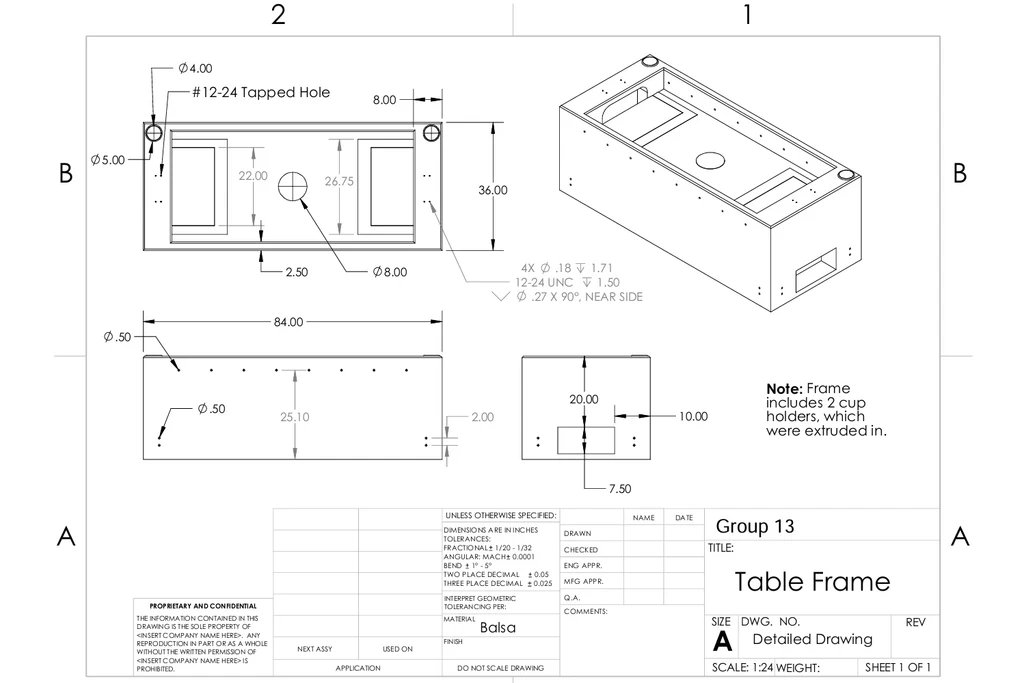
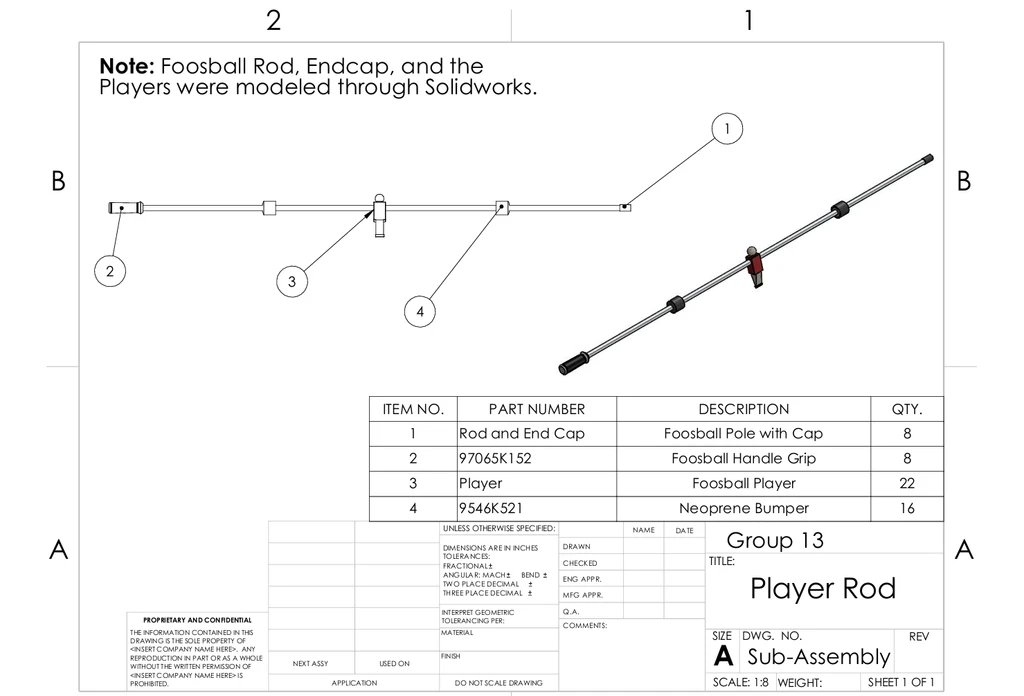
Full assembly, sub-assembly, detail drawings and exploded views per ASME Y14.5 GD&T standards. Foosball table full mechanical design.
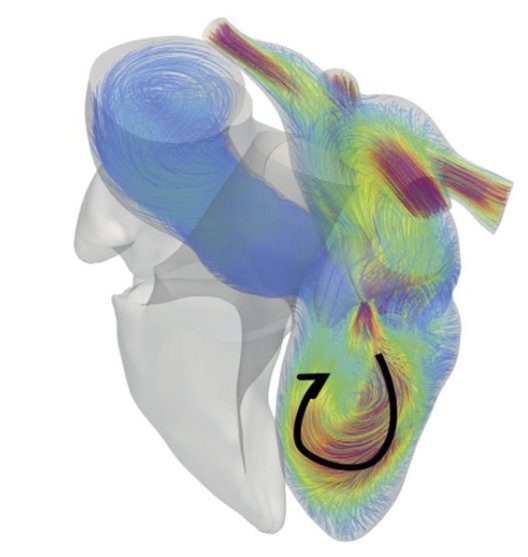
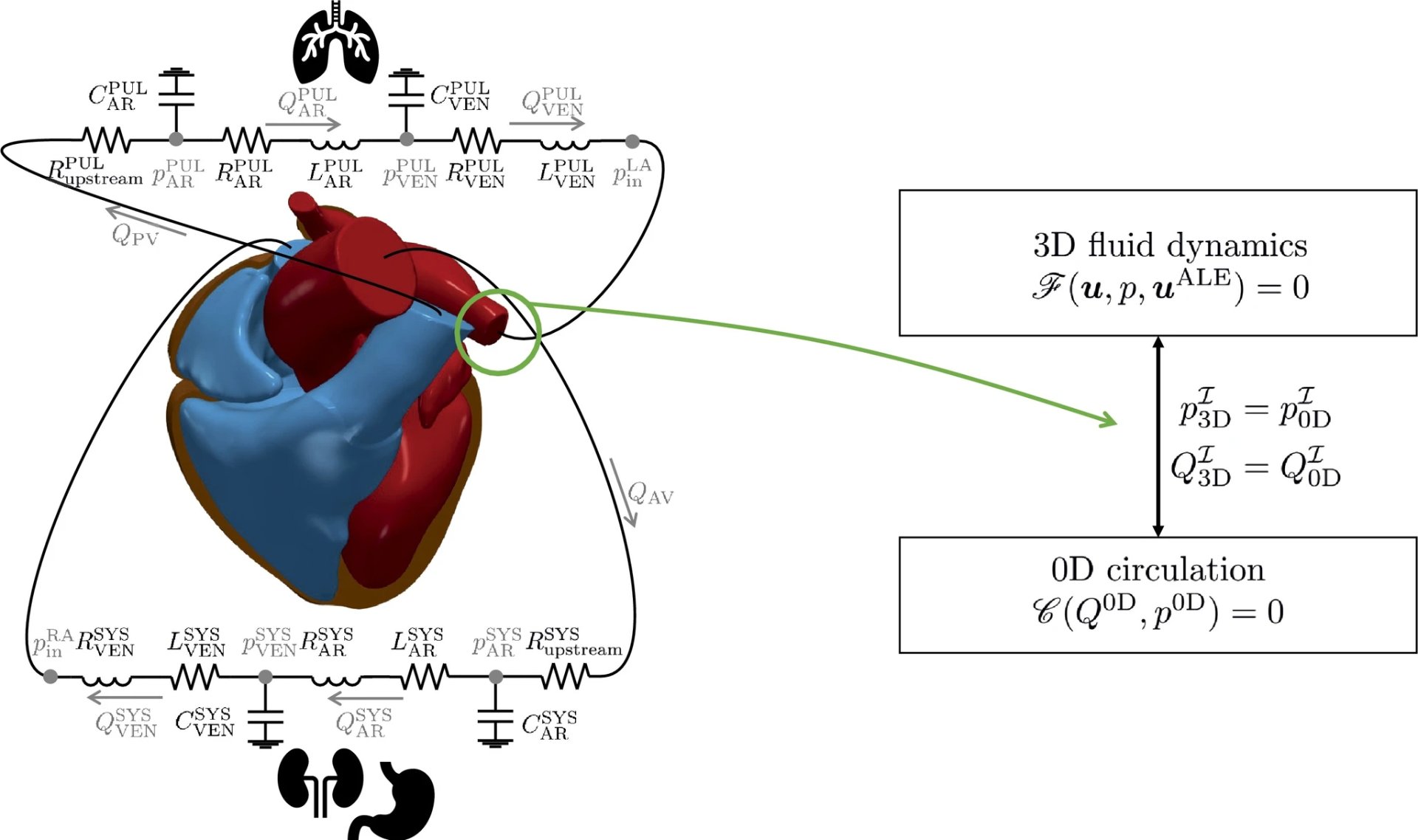
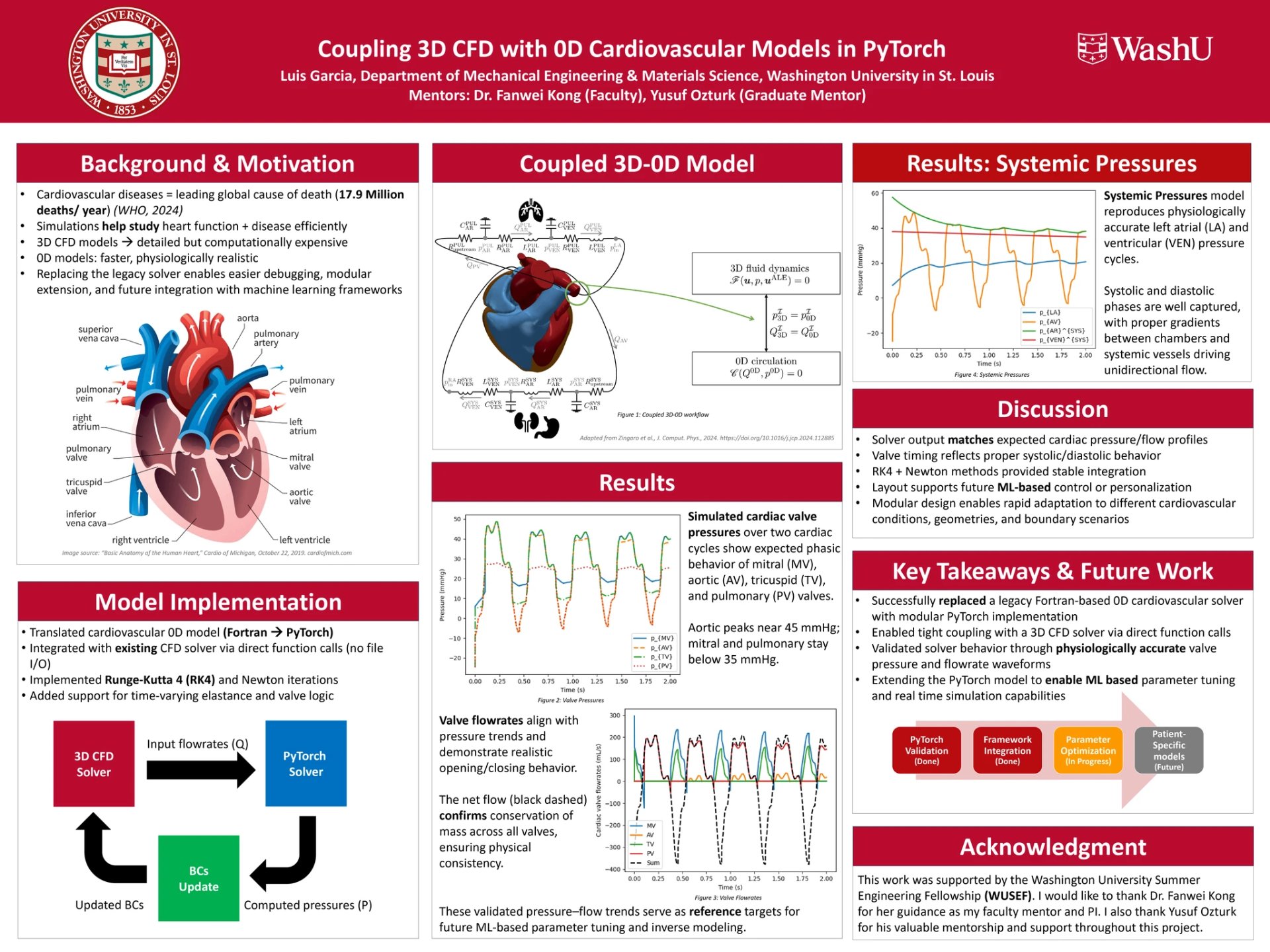
Physics-Informed Neural Networks (PINNs) in PyTorch for cardiovascular fluid simulations. Coupled 3D CFD with 0D cardiovascular models. 1000× speedup vs. traditional solvers. Presented at symposium.
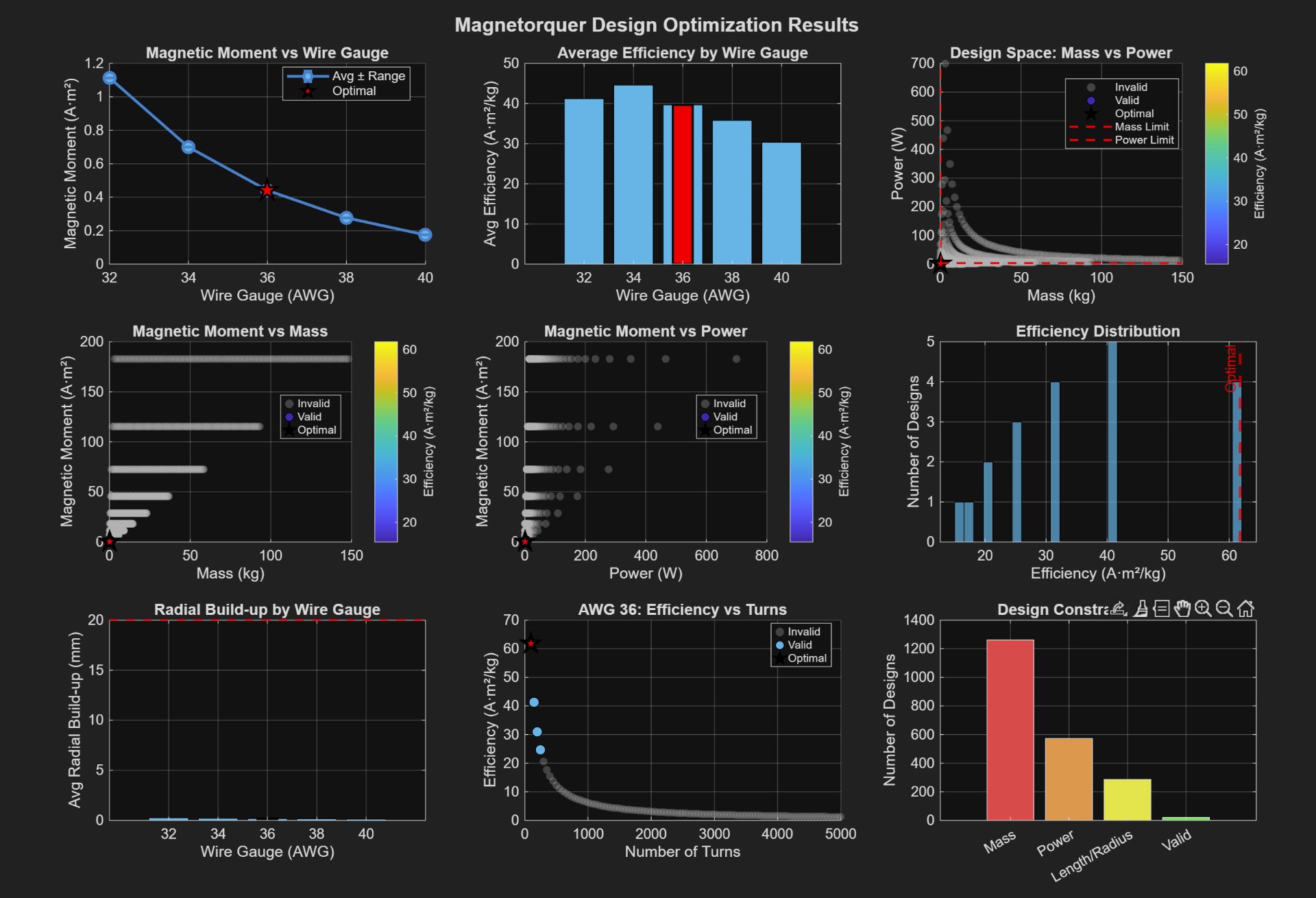
Full-mission simulations for CubeSat feasibility. Magnetorquer design optimization across wire gauges using MATLAB and ModelSpace (ATTX).